BOSM -Yatay Karşı Delme ve Delme Makinesi
1. Ekipman kullanımı:
BOSM yatay karşı delme ve delme makinesi, firmanızın kule vinç kapaklarını işlemesi için özel bir makinedir.Makine, etkili strok aralığında iş parçalarının delinmesini, frezelenmesini ve delinmesini gerçekleştirebilen 2 set yatay delme ve delme güç kafası ile donatılmıştır.Kesme ve diğer işlemler, ekipman konumlandırma hızı hızlıdır, işleme doğruluğu yüksektir ve işleme verimliliği yüksektir.
2. Ekipman yapısı özellikleri:
2. 1. Ana bileşenlermakine
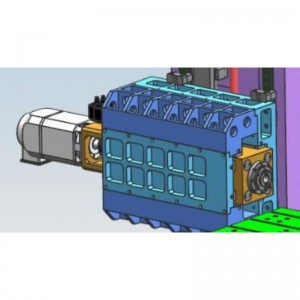
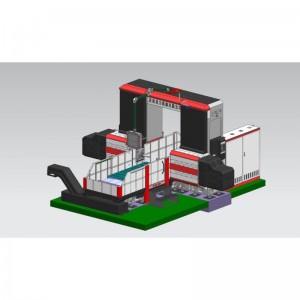
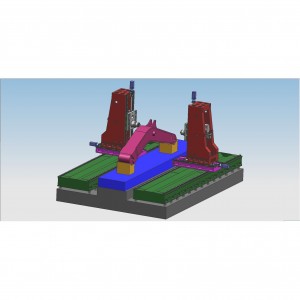
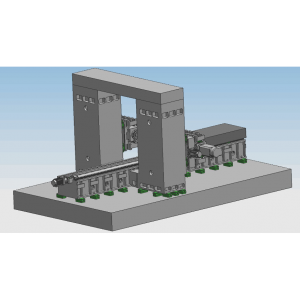
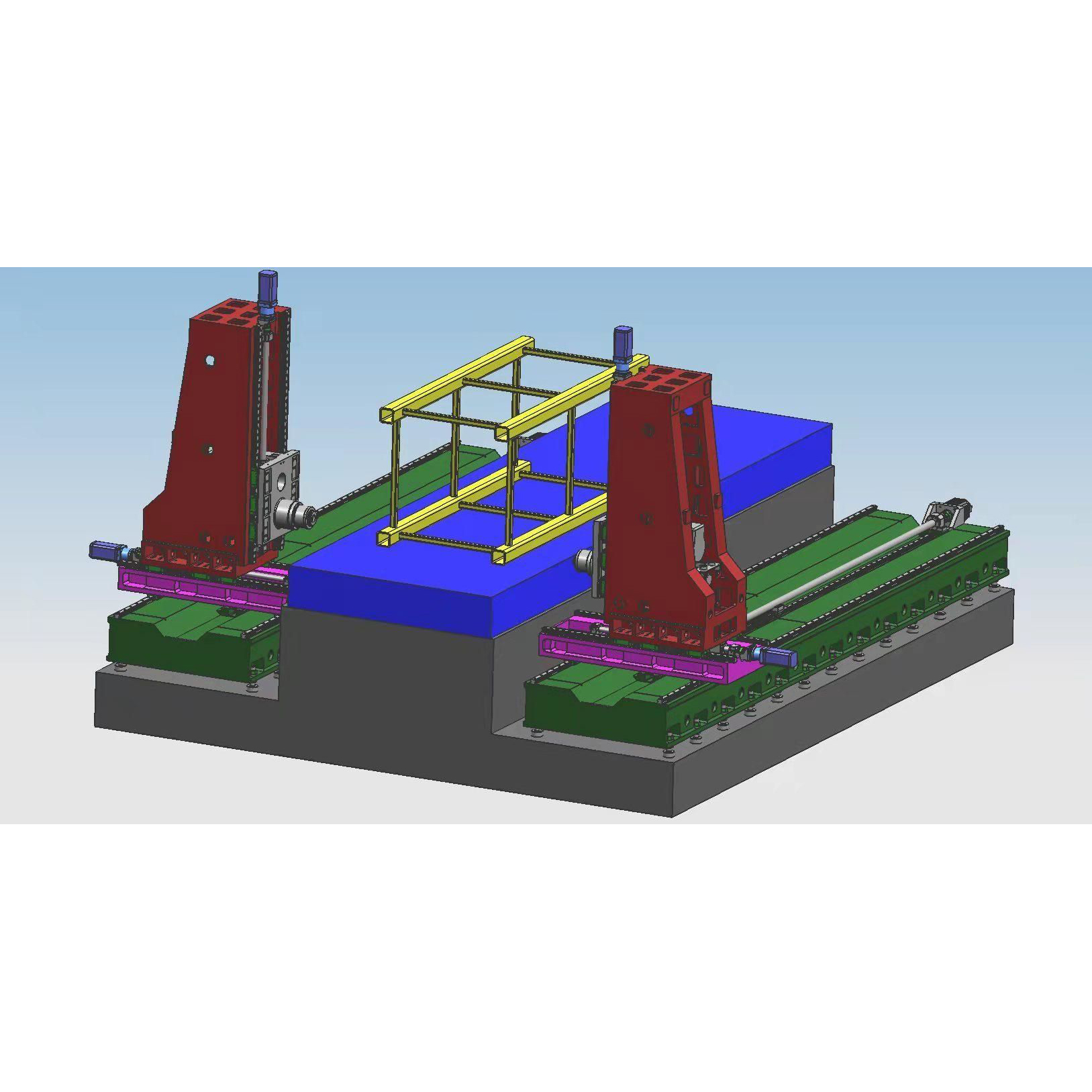
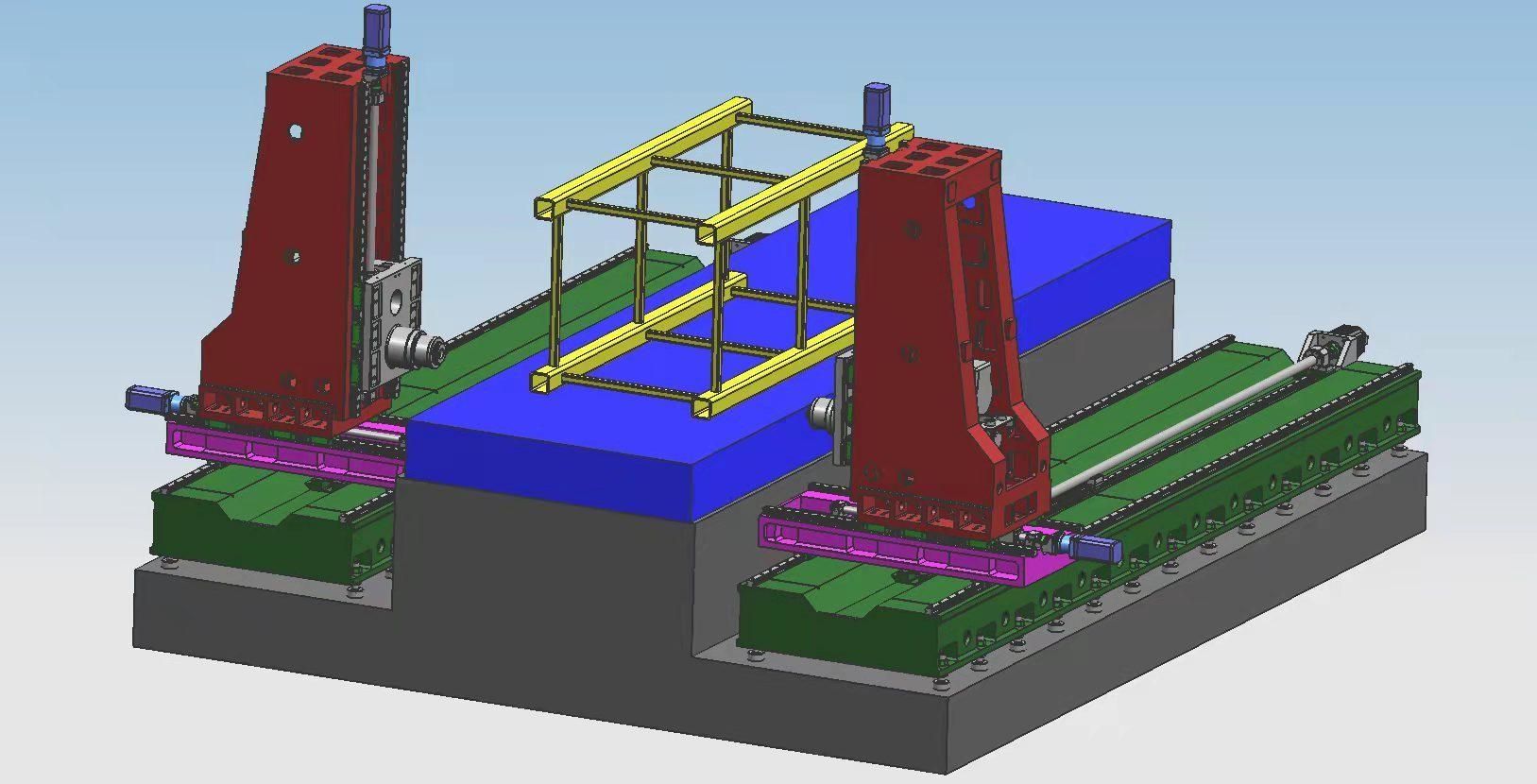
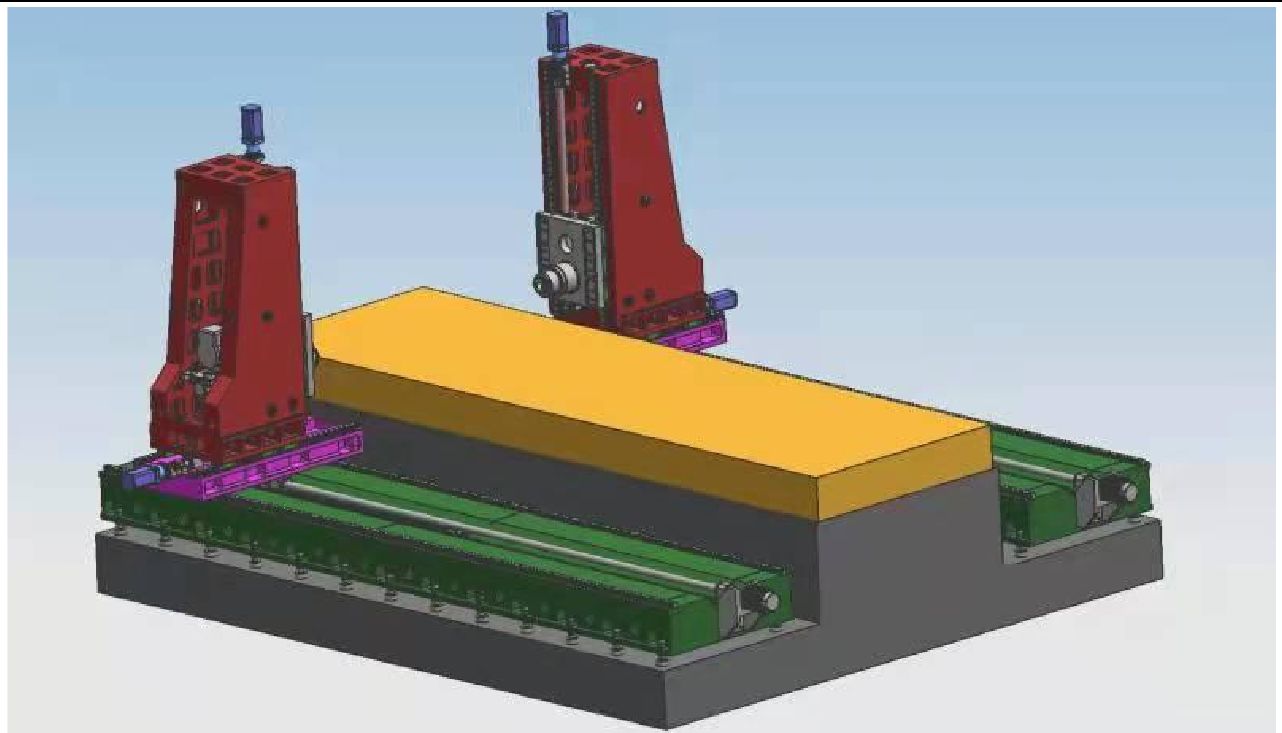
Makinenin ana bileşenleri: yatak, çalışma tezgahı, sol ve sağ sütunlar, eyerler, koçlar vb. fırın tavlama → titreşim yaşlandırma → Kaba işleme → titreşim yaşlandırma → fırın tavlama → titreşim yaşlandırma → parçaların negatif stresini tamamen ortadan kaldırmak ve parçaların performansını sabit tutmak için bitirme.Ekipmanın tezgahı sabittir ve her iki taraftaki güç başlıkları tabanın ön ve arka yönlerinde hareket edebilir;Makinenin delme, delme, havşa açma, kılavuz çekme vb. işlevleri vardır. Aletin soğutma yöntemi içten soğutma artı dıştan soğutmadır.Makine 5 besleme ekseni, aynı anda 5 eksenle senkronize olabilen veya tek etkili olabilen 2 kesme gücü kafası içerir.Makinenin eksenel yönü ve güç kafası aşağıdaki şekilde gösterilmiştir.
2. 2 Eksenel şanzıman besleme parçasının ana yapısı
2.2.1 X ekseni: Güç kafası, tabanın kılavuz rayı boyunca yanal olarak ileri geri hareket eder.
X1 eksenli sürücü: AC servo motor artı yüksek hassasiyetli planet redüktör, X ekseninin doğrusal hareketini gerçekleştirmek için güç kafasını vidalı milden geçirmek için kullanılır.
X2 eksenli şanzıman: AC servo motor artı yüksek hassasiyetli planet redüktör, X ekseni doğrusal hareketini gerçekleştirmek için güç kafasını vidalı mil iletiminden geçirmek için kullanılır.
Kılavuz ray formu: Genişletilmiş taban üzerine iki adet yüksek mukavemetli hassas lineer kılavuz ray döşenir.
2.2 Y1 ekseni: Güç kafası sütun üzerinde yukarı ve aşağı ileri geri hareket eder.
Y1 ekseni tahriki: Y1 ekseninin doğrusal hareketini gerçekleştirmek için bilyalı vidayı sürmek için AC servo motoru benimseyin.Kılavuz ray formu: 4 adet 45'lik lineer kılavuz ray.
2.2.3 Y2 ekseni: Güç kafası sütun üzerinde yukarı ve aşağı ileri geri hareket eder.
Y2 ekseni iletimi: AC servo motor, Y1 ekseninin doğrusal hareketini gerçekleştirmek için bilyalı vidayı sürmek için kullanılır.
Kılavuz ray formu: 4 adet 45'lik lineer kılavuz ray.
2.2.4 Z1 ekseni: Güç kafası sele üzerinde ileri geri hareket eder.
Z1 ekseni iletimi: Z1 ekseninin doğrusal hareketini gerçekleştirmek için hareketi bilyalı vida boyunca sürmek için AC servo motor ve yüksek hassasiyetli planet redüktör kullanılır.
2.2.5 Z2 ekseni: Güç kafası sele üzerinde ileri geri hareket eder.
Z2 eksenli şanzıman: AC servo motor ve yüksek hassasiyetli planet redüktör, Z2 eksenli doğrusal hareketi gerçekleştirmek için vidalı mil boyunca hareketi sürmek için kullanılır.
2.3. Talaş kaldırma ve soğutma
Tezgahın altında her iki tarafa monte edilmiş düz zincirli talaş konveyörleri vardır ve uygar üretimi gerçekleştirmek için demir talaşları sonunda talaş konveyörüne boşaltılabilir.Aletin performansını ve hizmet ömrünü sağlamak için aletin dahili soğutma + harici soğutması için kullanılabilen talaş konveyörünün soğutma sıvısı tankında bir soğutma pompası vardır ve soğutma sıvısı geri dönüştürülebilir.
3.Tam dijital sayısal kontrol sistemi:
3.1.Talaş kırma fonksiyonu ile insan-makine arayüzünde talaş kırma süresi ve talaş kırma döngüsü ayarlanabilir.
3.2.Alet kaldırma işleviyle, alet kaldırma mesafesi insan-makine arayüzünde ayarlanabilir.Mesafeye ulaşıldığında takım hızla kaldırılacak ve ardından talaşlar atılacak ve ardından delme yüzeyine hızla ilerletilecek ve otomatik olarak işe dönüştürülecektir.
3.2.Merkezi operasyon kontrol kutusu ve el ünitesi, sayısal kontrol sistemini benimser ve USB arabirimi ve LCD likit kristal ekran ile donatılmıştır.Programlamayı, depolamayı, görüntülemeyi ve iletişimi kolaylaştırmak için operasyon arabiriminde insan-makine diyaloğu, hata telafisi ve otomatik alarm gibi işlevler bulunur.
3.2.. Ekipman, işlemeden önce delik konumunu önizleme ve yeniden inceleme işlevine sahiptir ve işlem çok uygundur.
4.Otomatik yağlama
Makine hassas lineer kılavuz ray çiftleri, hassas vidalı mil çiftleri ve diğer yüksek hassasiyetli hareket çiftleri, otomatik yağlama sistemleriyle donatılmıştır.Otomatik yağlama pompası basınçlı yağ verir ve kantitatif yağlayıcı yağ haznesi yağa girer.Yağ haznesi yağ ile dolduğunda ve sistem basıncı 1,4~1,75Mpa'ya yükseldiğinde, sistemdeki basınç anahtarı kapanır, pompa durur ve aynı zamanda boşaltma valfi boşaltılır.Yoldaki yağ basıncı 0,2Mpa'nın altına düştüğünde kantitatif yağlayıcı, yağlama noktasını doldurmaya başlar ve bir yağ dolumunu tamamlar.Kantitatif yağlayıcı tarafından sağlanan kesin yağ miktarı ve sistem basıncını tespit etme yeteneği nedeniyle, yağ beslemesi güvenilirdir ve her kinematik çiftin yüzeyinde sürtünmeyi ve aşınmayı azaltan ve hasarı önleyen bir yağ filmi olmasını sağlar. aşırı ısınmanın neden olduğu iç yapıya., Makinenin doğruluğunu ve ömrünü sağlamak için.
5. makineortamı kullan:
Güç kaynağı: Üç fazlı AC380V±10%, 50Hz±1 Ortam sıcaklığı: -10°~ 45°
6.Kabul kriterleri:
JB/T10051-1999 "Talaşlı İmalat Makinalarının Hidrolik Sistemi İçin Genel Teknik Şartname"
7.teknik parametreler:
| modeli | 2050-5Z | |
| Maksimum işleme iş parçası boyutu | Uzunluk × genişlik × yükseklik (mm) | 5000×2000×1500 |
| çalışma masası boyutu | Uzunluk X Genişlik (mm) | 5000*2000 |
| Güç başlığı taban yönü hareketi | İleri geri hareket et (mm) | 5000 |
| Güç kafası yukarı ve aşağı | Silindirin yukarı ve aşağı vuruşu (mm) | 1500 |
|
Yatay şahmerdan tipi delme güç kafası Güç kafası 1 2 | Miktar (2 adet) | 2 |
| Mil konikliği | BT50 | |
| Delme çapı (mm) | Φ2-Φ60 | |
| Kılavuz çekme çapı (mm) | M3-M30 | |
| Mil hızı (d/dak) | 30~3000 | |
| Servo iş mili motor gücü (kw) | 22*2 | |
| Sol ve sağ hareket (mm) | 600 | |
| Çift Yönlü Konumlandırma Doğruluğu | 300mm*300mm | ±0,025 |
| Çift yönlü tekrar konumlandırma doğruluğu | 300mm*300mm | ±0,02 |